基于三角测距原理的3维激光雷达的设计
打开文本图片集
摘 要:该文针对传统的工业激光雷达成本较高,操作复杂等不足,提出了成本较低的基于三角测距原理的3维激光雷达的设计。通过实际扫描实验显示3维激光雷达在10 m内都能正确识别物体形状,误差水平在5 mm左右。因此,完全可以在大多数场合下替代传统的工业激光雷达使用。
关键词:三角测距 激光雷达 点云 光点提取
中图分类号:O439 文献标识码:A 文章编号:1672-3791(2017)06(a)-0003-02
激光雷达通过激光主动探测即可快速获取物体表面的信息数据,是现代测量技术的新手段。同时激光雷达的点云数据的重建在多媒体、产品设计、医学、动画业等许多领域内都有广泛应用。但是市面上的激光雷达系统普遍价格高昂,这对普及激光雷达的使用带来了极大的阻碍。针对这一现状该文研制了基于三角测距原理的3维激光雷达,这一系统成本极低、使用方便、适应性强,因此能够极大的普及激光雷达的使用。
1 3维激光雷达扫描测量原理
激光雷达现在普遍采用的测量方法有两种:第一种是利用相位差和时间差进行的TOF测距,第二种是三角测距。因为第一种方式所要实现的硬件设备成本较高,所以该文采用的是第二种成本较低的三角测距。这也是该文实现低成本激光测距的关键,因为三角测距不需要用到TOF测距所要求的复杂硬件设备,并且在一定范围之内,三角测距也可以达到与TOF测距相媲美的测距精度和分辨率。
1.1 激光雷达三角测距原理
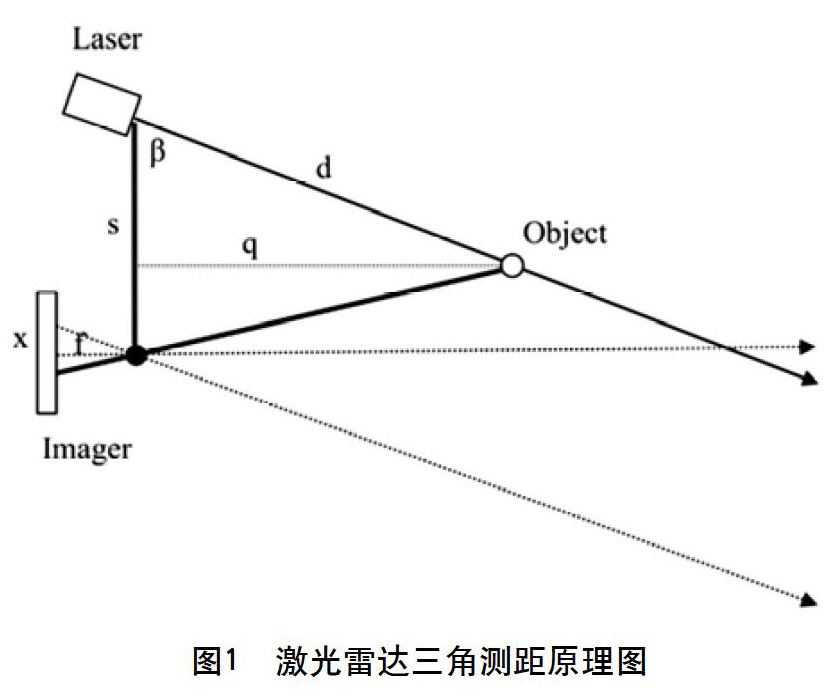
图1中展示了对测量对象(Object)距离激光器的距离为d的示意图。图1中的Imager是摄像头,Laser是点状激光器,标有s的线段可以看成是一个固定摄像头和激光器的平面。摄像头成像平面与该固定平面平行,而激光器发出的射线与该平面夹角beta仅存在于图中的视图中。所以由图1可以得到如下公式:
公式1中的s 为激光器中心与摄像头中心点距离;f 为摄像头的焦距;x 为物体上激光光点在摄像头感光元件上的成像到一侧边缘的距离。公式(1)和(2)就是三角测距的基本原理。
2 3维激光雷达电子系统与机械结构设计
如图2中的流程图,该文所设计的3维激光雷达的电子系统主要由三大部分组成。第一部分是由键盘输入、串口通信、数码管显示、供电电源模块组成的子模块系统;第二部分是STM32单片机为内核的数据处理系统;第三部分为线性激光器和摄像头、舵机组成的扫描系统。其中子模块系统组成十分简单,在此不做赘述。
数据处理系统选用的是意法半导体公司的STM32F103ZET6这一款芯片,它拥有高速的处理速度,是当前嵌入式产品的一款主流芯片。由线性激光器扫描得到的距离数据和摄像头采集的图像数据在STM32单片机中进行初步的处理和拟合然后才能被送到PC中进行最后的处理和显示。
扫描系统是通过控制舵机步进转动来配合摄像头与线性激光器来得到一组点云数据。首先打开线性激光器,线性激光和被测物体表面相交形成一条起伏变化的亮线。这条亮线最终成像在摄像机的感光元件面上,经光电转换变成电信号后,再送入STM32单片机中由三角测距原理测出这条亮线上各点的空间三维坐标数据。再由舵机带动线性激光器做步进转动,使激光平面在物体表面上扫描,从而得到关于被测物体表面信息的一组点云数据。
机械结构主要为舵机云台的搭建,要注意线性激光器与s平面的夹角beta不能过大,在70~90 deg之间最好,该文选取的是83 deg。同时需要移除摄像头的红外截止滤光片,不然摄像头对红外光的感应很弱,无法进行正常的信息采集。
3 3维激光雷达的图像处理与矫正
通过线性激光器和摄像头扫描得到的原始数据激光光点信息不明确,如果直接进行数据重建很容易出现错误。故需要知道激光光点的准确坐标。对于一般的点状激光器可以通过质心法进行求解,当然对于线性激光器也可以通过类似的过程应用线性插值求质心的方法求得相应的一列激光光点坐标。不过过程较为复杂且运算量较大。因此该文采用了一种新的求激光光点坐标的方法。即将激光亮线看成是符合高斯分布的,通过计算这个高斯函数的一阶导数的过零点坐标,即为原高斯函数的峰值,也就是需要求取的光点坐标。
因为该设计采用的是广角无畸变摄像头,故摄像头畸变矫正较为简单,该文采取了传统的棋盘法进行矫正,并将矫正数据导入MATLAB的Camera Calibration Toolbox工具箱中进行数据拟合从而得到矫正后的摄像头数据。
对测距参数的矫正采用实测法,即通过实际测量的距离数据与线性激光器所测得的距离数据进行拟合来达到对线性激光器测距参数进行矫正的目的。
最后将矫正处理过后所测得的点云数据通过公式(3)进行激光光点的计算后导入到PC中的MeshLab软件中进行数据重建和三维渲染即可的到最后的3维图像。
4 结语
该文在2维激光扫描测量的基础上,利用线性激光扫描技术,可得到被测物体的完整三维数字模型。并介绍了3维激光雷达扫描的基本原理和其激光光点的计算方法。经过实际扫描实验显示该设计扫描精度高,扫描速度快且该设计成本极,故将极大的普及激光雷达的使用。
参考文献
[1]K.Konolige, J.Augenbraun,N.Donaldson,C.Fiebig,and P.Shah.A low-cost laser distance sensor.In Int.Conference on Robotics and Automation (ICRA)[Z].2008.
[2]J.Forest,J.Salvi,E.Cabruja,C.Pous,Laser stripe peak detector for 3D scanners.A FIR filter approach[J].International Conference on Pattern Recognition,Cambridge,August,2004(3):646-649.
[3]罗德安,朱光,陆立,廖丽琼.基于3维激光影像扫描技术的整体变形监测[J].测绘通报,2005(7):40-42.
[4]郑德华,沈云中,刘春.三维激光扫描仪及其测量误差影响因素分析[J].测绘工程,2005(2):32-34,56.
[5]毛方儒,王磊.三维激光扫描测量技术[J].宇航计测技术,2005(2):1-6.
[6]王建文,贾小云.快速3D激光扫描技术的研究[J].微电子学与计算机,2004(9):125-126,130.
[7]许智钦,孙长库,陶立,等.彩色三维激光扫描测量方法的研究[J].光学学报,2003(8):1008-1012.
[8]李清泉,李必军,陈静.激光雷達测量技术及其应用研究[J].武汉测绘科技大学学报,2000(5):387-392.
版权声明:
1.文驰范文网的资料来自互联网以及用户的投稿,用于非商业性学习目的免费阅览。
2.《基于三角测距原理的3维激光雷达的设计》一文的著作权归原作者所有,仅供学习参考,转载或引用时请保留版权信息。
3.如果本网所转载内容不慎侵犯了您的权益,请联系我们,我们将会及时删除。